雙振動(dòng)電機(jī)同步最優(yōu)控制方法
發(fā)布時(shí)間:2020-11-05 點(diǎn)擊量:317
在開(kāi)始控制實(shí)驗(yàn)之前, 利用諧波掃描法辨識(shí)出 雙振動(dòng)電機(jī)的模型參數(shù)為, 電機(jī)1 折算到電機(jī)軸的 等效轉(zhuǎn)動(dòng)慣量為J1 = 01002 28 V / ( deg# s- 2 ), 等效 粘性阻尼系數(shù)為B 1 = 01156 39 V / ( deg# s- 1 ) ; 電 機(jī)2 的折算到電機(jī)軸的等效轉(zhuǎn)動(dòng)慣量為J 2 = 01001 683 V / ( deg# s- 2 ), 等效粘性阻尼系數(shù)為 B2 = 01159 06 V / ( deg# s- 1 )。振動(dòng)電機(jī)的角位移由 增量式編碼器測(cè)量。角速度通過(guò)對(duì)角位移的微分得 到(施加適當(dāng)?shù)牡屯V波)。
實(shí)驗(yàn)在M atlab /Simulink /xPC Target的實(shí)時(shí)環(huán)境 下進(jìn)行。Nat iona l Instruments的N I-PC I6601卡用于 編碼器與電腦的連接。主從跟蹤式PID 控制, 及最 優(yōu)跟蹤控制結(jié)果, 分別如圖4, 圖5所示。
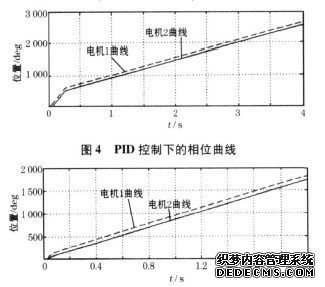
從上面2幅實(shí)驗(yàn)結(jié)果圖可以看出, PID 控制下 的同步調(diào)整(包括轉(zhuǎn)速和相位差的調(diào)整)時(shí)間較長(zhǎng), 約為013 s, 而最優(yōu)控制下的調(diào)整時(shí)間約為0103 s。 實(shí)驗(yàn)證明, 最優(yōu)控制的效果要比PID控制好得多。
另一個(gè)值得指出的問(wèn)題是, 實(shí)驗(yàn)中測(cè)量角位移 時(shí)所采用的是增量式編碼器, 連接到6601 編碼器 輸入卡時(shí)計(jì)數(shù)器在足夠長(zhǎng)的時(shí)間后會(huì)產(chǎn)生溢出, 從 而使控制崩潰。因此, 從工業(yè)應(yīng)用的角度出發(fā), 在 振動(dòng)電機(jī)同步控制系統(tǒng)中不應(yīng)使用上述測(cè)量方式, 而應(yīng)當(dāng)使用0~ 360 deg輸出的角度傳感器, 并且對(duì) 相位差z進(jìn)行如下的變換, 以保證系統(tǒng)的穩(wěn)定:
由表1可判斷出泄漏電流和介紹損耗tgD分別 為146148, 013時(shí)的電纜狀態(tài)測(cè)量點(diǎn)為孤立點(diǎn), 因 為此點(diǎn)與自身聚類中心點(diǎn)的距離大于d。
通過(guò)算例可以看出, 在使用了本文所提出的梯 度聚類孤立點(diǎn)檢測(cè)方法后, 可以很方便地檢測(cè)出度 量有誤的數(shù)據(jù)。聯(lián)系電話13072684455(微信同步)